


حسگر اپتیکی ریز چینی؛ لمس هوشمند برای روباتهای جراحی
به گزارش تابناک به نقل ازصداوسیما؛ این دستگاه با استفاده از نور به جای تجهیزات الکترونیک، فشار، نیرو و پیچش را در هر جهت میسنجد.
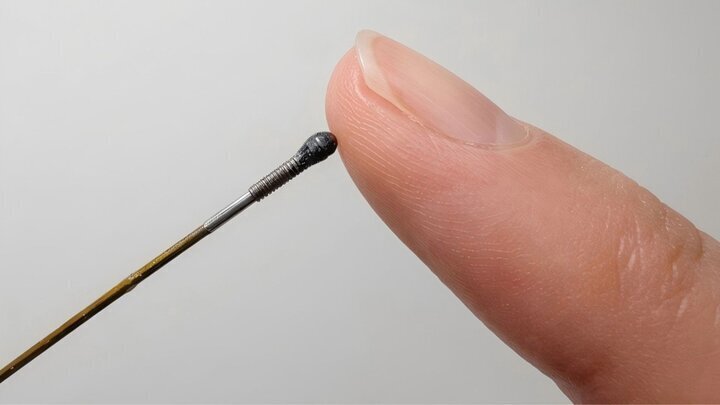
اندازه حسگر ۱.۷ میلیمتر است که به گفته محققان به روباتها در ردیابی تماسهای غیرایمن در فرایندهای حساس و واکنش سریع کمک میکند. محققان همچنین نشان دادهاند این دستگاه قادر به شناسایی ساختارهای مخفی زیر مواد نرم از جمله مواردی مشابه تومور در بافتهای مدل بوده است.
پژوهشگران دانشگاه جیائو تانگ این تحقیق را انجام دادهاند. سیستمهای جراحی روباتیک فعلی به شدت به عکسبرداری متکی هستند، اما آنها برای حس کردن تعامل فیزیکی در فضاهای جراحی باریک با چالش روبهرو هستند. حسگرهای نیروی فعلی برای بسیای از ابزارهای مینیاتوری بزرگ هستند.
«جیائولانگ یانگ» محقق ارشد پژوهش میگوید: هرچند سیستمهای عکسبرداری مدرن میتوانند ساختارها را به طور واضح نشان دهند، اما آنها اطلاعاتی درباره تعامل فیزیکی مانند نیرو یا گشتاور منتقل نمیکنند و حسگرهای فعلی نیرو نیز در حال حاضر بسیار سنگین یا پیچیده هستند و نمیتوان آنها را در ابزارهای مینیاتوری به کار برد.
وی در ادامه افزود: فناوری ما با فراهم کردن امکان سنجش نیروی تماس، فشار و پیچش به روباتها امکان میدهد تماسهای غیرایمن زودهنگام را ردیابی و اعمال را به طور واقعی به خصوص در محیطهای کوچک و حساس تنظیم کنند.
محققان این حسگر را براساس یک فیبر نوری با سری الاستومری و نرم توسعه دادهاند. هنگامیکه سر حسگر شی را لمس میکند، اندکی تغییر شکل میدهد. این حرکت کوچک شیوه انتشار نور داخل حسگر را تغییر میدهد.
یک دسته فیبر هماهنگ در مرحله بعد الگوی نور را به دوربین منتقل میکنند. این سیستم تصویر ثبت شده را با استفاده از روشهای مبتنی بر داده تحلیل میکند تا نیرو و گشتاور در تمام جهات را بسنجد.
به گفته پژ وهشگران این تنظیمات نیازمند سیم کشیهای پیچیده در حسگرهای مینیاتوری را از بین میبرد. همچنین آنها دستگاه را تحت شرایط بارگذاری کنترلشده با استفاده از نیروها و حرکات چرخشی شناختهشده آزمایش کردند. حسگر اندازهگیریهایی تکرارپذیر ارائه داد که خوانش دادههای آنها در طول چرخههای بارگذاری و تخلیه بار ثابت ماندند
